

Visit us at the Intergeo 2025 in Frankfurt am Main, Germany. Our experts for the products Scantra and Systra are looking…
zum ArtikelBased on Station IDs
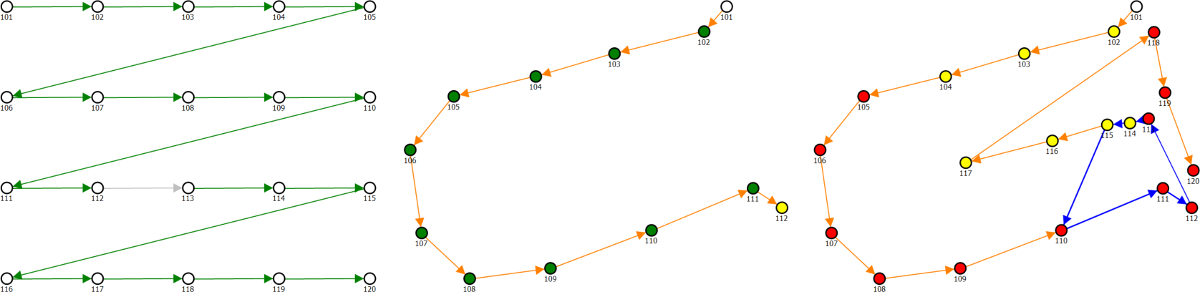
In a lot of projects data is captured by performing a scan and then moving it a bit further so that next station is redundantly capturing parts of the previous scene. For projects that are carried out in this traverse-like setup one can easily connect the scans based on their Station IDs. The left part of the following figure shows Scantra’s Adjacency Graph where relations between scans were automatically established based on their Station IDs. The green arrows indicate that the pairwise registration was successful while it was not possible in case of the grey arrow between two scans. Hence, not all scans are connected after the bundle adjustment as depicted in the centre figure. By adding one more connection all scans are now registered to at least one other scan as shown on the right. It can be seen that all datasets are registered into one common coordinate system. As a next step, more connections between scans should be defined, if possible, to increase redundancy and thus reliability.
Visually guided Definition
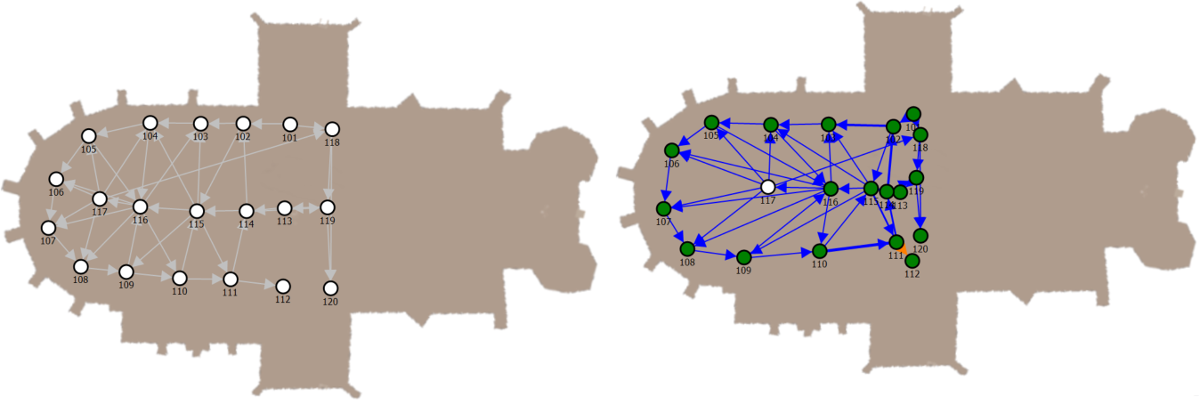
For the documentation of buildings, it is common that building plans or 2D CAD drawings are available prior to its observation. This visual information can be used to place the scans to their approximate location in the plan. Again, the geometrical position is not relevant but the topological adjacencies that are described by the Adjacency Graph. An example is given on the left of the following figure before and after the block adjustment as shown on the right.
Automatic Generation of the Adjacency Graph
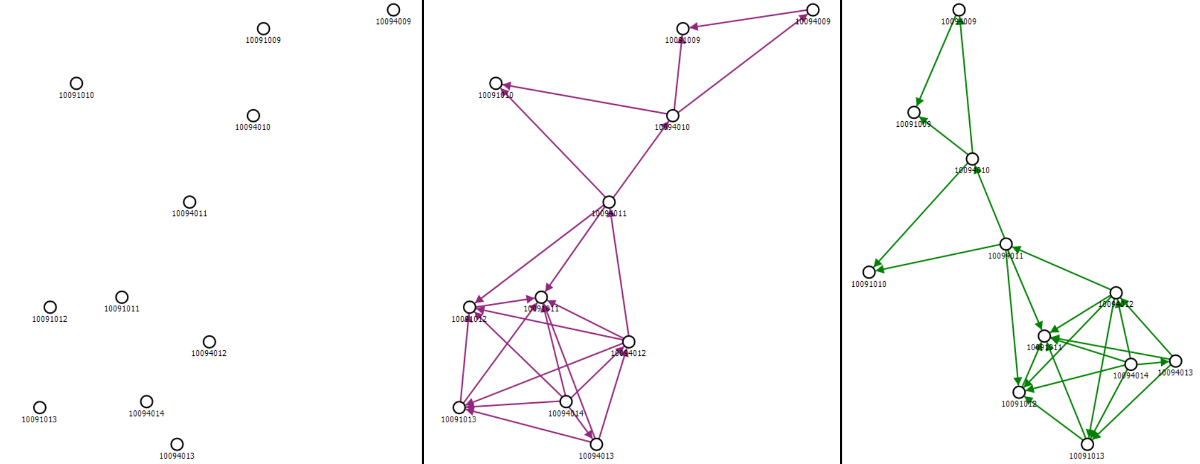
The latest generation of terrestrial laser scanners deploys additional sensors for direct georeferencing such as GNSS-antennas, IMUs, cameras, compasses and the like to determine a scanner’s location and orientation. Scantra is capable to use this information to a) place the stations in the Adjacency Graph and b) to connect stations based on user defined settings. This accelerates the registration procedure since the coarse orientation and location serve as input parameters for pairwise registration. The figure below shows a set of stations that were placed in the Adjacency Graph window according to their pose that is stored in the file’s meta-data. The centre part shows automatically generated connections between scans. These were computed based on user-defined settings that specify a horizontal and vertical radius in which a connected station may be located. If this is the case, Scantra generates a connection. The purple colour indicates that initial values have been computed based on the given orientation and location which significantly accelerates pairwise registration. On the right of the figure the graph is shown after pairwise registration. It is also possible to refine existing projects that were already registered by other software. This can for instance be helpful in the case that the achieved accuracy was not sufficient or that explicit and meaningful quality measures are required.
Latest Scantra news and events
We're delighted to announce that Scantra 3.4 Static, Kinematic and Polar can be downloaded from our server. Detailed inf…
zum ArtikelWe're delighted to announce that Scantra 3.3 KINEMATIC, PRO and LT can be downloaded from our server. Detailed informati…
zum ArtikelWe're delighted to announce that Scantra 3.2 PRO and LT can be downloaded from our server. Detailed information about th…
zum ArtikelWe're delighted to announce that Scantra 3.0 PRO and LT can be downloaded from our server. Detailed information about th…
zum Artikel
Visit us at the Intergeo 2022 in Essen, Germany. Our experts for the products Scantra and Systra look forward to your vi…
zum Artikel